Robots on the Trail: Navigating the Unpredictable Paths
Robots are learning to navigate hiking trails, combining geometry and semantics for effective trail traversal. This isn't just about tech. it's about expanding possibilities.
Hiking trails are unpredictable. Nature has its way of throwing in surprises, fallen trees, exposed roots, or sudden pools of water. It's this variability that technology is now tackling. How does a robot perceive, plan, and adapt to these ever-changing paths? The challenge is real.
Understanding the Terrain
The United States boasts over 193,500 miles of trails on federal lands alone, with many more under state and local management. These paths are trodden by millions annually. Imagine the potential if robots could autonomously navigate them. We're talking about trail monitoring, environmental data collection, and even search-and-rescue missions. But the real game here isn't about replacing humans. It's expanding reach.
The task is twofold: keeping robots on the trail and letting them intelligently deviate when necessary. Silicon Valley designs it, but the question is where it works. How do you ensure a bot can handle both the trail and its unexpected detours?
The Dual Approach: Geometry Meets Semantics
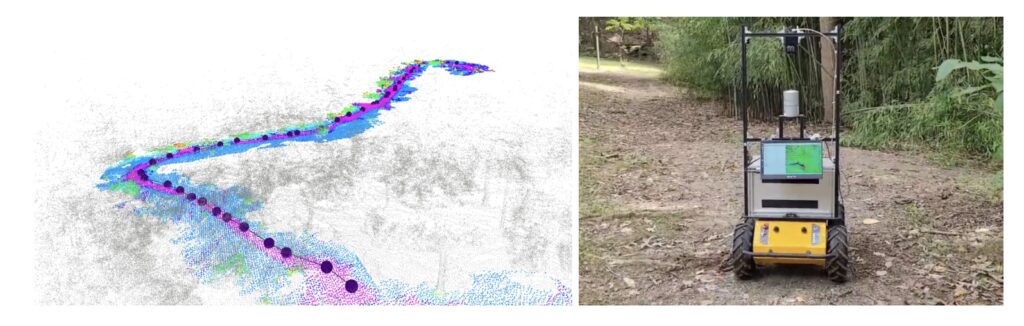
In practice, two approaches are key. First, geometric terrain analysis using LiDAR helps detect slopes and obstacles. It's like giving the robot eyes to see big hazards. But what about those small, tricky spots like loose sand or mud? That's where semantic perception, through camera images, steps in. By distinguishing visually, it informs the bot whether it's looking at a trail, grass, or rocks.
This combination isn't about advanced tech jargon. It's about creating a practical solution that works in real conditions. By fusing these methods, a comprehensive map emerges. It's a traversability map where every point has a cost, prioritizing the safest paths. This isn't just tech for tech's sake. It's about making these robots truly capable in the wild.
Real-World Testing and Future Horizons
Testing at the West Virginia University Core Arboretum, using a Clearpath Husky robot, showed promising results. The robot navigated trails while balancing between staying on path and knowing when to deviate. It's this flexibility that makes them viable for real-world deployment.
But what next? Imagine expanding the dataset to cover different seasons or trail types. The goal is to improve under various lighting and weather conditions. This isn't just theory. it's the next step in practical application.
So why should you care? Because it's not just about robots on trails. It's about the possibilities of technology in unpredictable environments. The farmer I spoke with put it simply: 'This isn't about replacing workers. It's about reach.'
Get AI news in your inbox
Daily digest of what matters in AI.